Recentemente, eu estava lendo as informações da Amazon sobre a AWS IoT Platform e me deparei com um exemplo de caso de uso interessante:
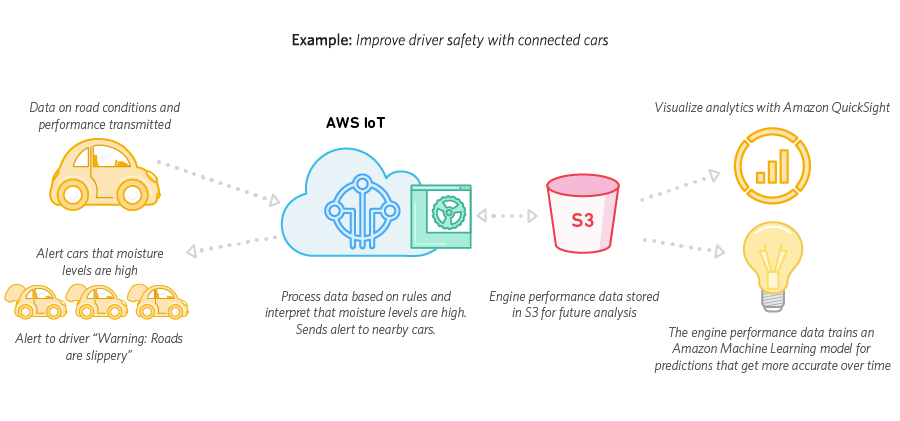
Embora eles não descrevam exatamente como os dados de condição da estrada são detectados, se o sensor pode detectar uma estrada molhada, por que a Amazon sugere o envio dos dados para a nuvem? Não seria mais simples apenas para processar diretamente os dados de sensores no veículo e alertar o condutor, ao invés de detecção, o envio de dados para a nuvem, esperando que ele seja processado, recebendo dados e , em seguida, alertando o motorista? Na verdade, não vejo muitas vantagens além dos possíveis dados analíticos que você obteria.
O exemplo de caso de uso da Amazon é benéfico apenas quando você deseja obter dados analíticos ou há outros motivos pelos quais eles sugerem o uso da nuvem?
Suspeito que uma das razões seja simplesmente fazer as pessoas usarem o serviço que estão tentando vender, mas estou interessado em razões técnicas , se houver.
fonte